LIIKENNE JA VÄYLÄT

Konenäkö avaa uusia mahdollisuuksia väyläomaisuuden hallintaan
Helsingin kaupunki kokeili automaattista liikennemerkkien inventointia
Helsingissä on kokeiltu uutta teknologiaa liikenne-merkkien inventoinnissa. Kokeilussa koottiin tietoa pysäköintikieltomerkeistä sähköiseen muotoon. Tietoa käytetään pysäköinninvalvonnan kehittämiseen sekä asukkaille tarjottavaan informaatioon.
Teksti Mika Leivo Kuvat Vionice Oy
Digitalisaation vaikutukset ulottuvat tänä päivänä käytännön palveluratkaisuina omaisuuden hallintaan. Ne myös mahdollistavat tarkemman johtamisen ja prosessien kehittämisen.
Tästä eräänä esimerkkinä on konenäköpohjainen omaisuuden hallintajärjestelmä. Sen ensimmäinen tuotteistus on automaattinen liikennemerkkien inventointipalvelu, jota Helsingin kaupunki ja palvelun tuotteistanut lappeenrantalainen Vionice Oy pilotoivat yhdessä Katajanokan alueella.
Helsingin rakennusviraston projektipäällikkö Oskari Rantanen on tyytyväinen Katajanokan pilotin tuloksiin.
– Vaikuttaa siltä, että tämän tyyppinen automaatio on ulottamassa toimintaansa kaupunkien prosesseihin. Meidän tapauksessamme kiinnostuksen kohteina ovat pysäköintikiellon osoittavat liikennemerkit lisäkilpineen ja niiden vaikutusalueet. Pyrimme kehittämään pysäköinninvalvontaa ja asukkaille suunnattuja informaatiopalveluja. Nyt toteutettu pilottiprojekti osoitti, että kustannustehokas, jatkuva inventointiprosessi on mahdollinen, Rantanen arvioi.
Tietoa monella tavalla käytettäväksi
Pilottiprojektissa kokeiltu ratkaisu perustuu oppivaan konenäköön ja koneoppimiseen, jotka yhdistetään kaupungin omiin omaisuudenhallinnan prosesseihin. Innovaatio on yksinkertainen palveluratkaisu. Siinä kaupungin tai kunnossapitäjän omissa prosesseissa voidaan tuottaa normaalilla modernilla älypuhelimella videokuvaa, josta liikennemerkit tunnistetaan, luokitellaan ja georeferoidaan katuverkolle oikeille paikoilleen.
Palvelun lopputuotteena syntyy liikennemerkkien sijainneista ja vaikutussuunnista muodostettu omaisuuskartta ja halutun muotoinen siirtotiedosto siirrettäväksi kaupungin omaan tietojärjestelmään. Lisäksi helppokäyttöisen selainsovelluksen kautta voi sivutuotteena syntynyttä videomateriaalia hyödyntää karttakäyttöliittymän kautta niissä kunnan prosesseissa, joissa ajantasaisesta videomateriaalista on hyötyä.
– Meille tämä projekti oli mielenkiintoinen sillä se hyödyntää meidän omia prosesseja ja on siten oletettavasti edullisempi kuin perinteiset ratkaisut liikennemerkkien inventointiin. Merkit tuli inventoitua riittävän tarkasti ja kattavasti. Videokuvasta on helppo tehdä toimituksen ja prosessien laadunarviointia, Oskari Rantanen sanoo.
Tulevaisuutta vai tätä päivää?
– Kuvantunnistus ja koneoppiminen ovat saavuttaneet tason, jossa vaihtuvissa olosuhteissa syntyvästä videomateriaalista voidaan tapahtumia tai asioita muuttaa ymmärrykseksi. Vasta viime vuosina tapahtuneen menetelmien, kuvaustekniikoiden ja prosessointitehon kehityksen myötä tämä on mahdollista, sanoo projektitoimituksesta vastannut konenäköasiantuntija Mikko Haavisto Vionice Oy.stä.
– Liikennemerkit ja niiden inventointi ei ole ainoa mahdollinen sovelluskohde modernille konenäölle, mutta niillä oppivan järjestelmän kouluttaminen on luontevaa aloittaa, ja kaupungeilla vaikuttaa olevan selvä tarve saada liikennemerkki- asiat kuntoon.
Konenäköjärjestelmästä tehokkuutta ja lisäarvoa
Pilottiprojektin pohjalta Vionice Oy:ssä on tarkoitus jatkaa tuotekehitystä yhdessä asiakkaiden kanssa. Muun muassa Helsingin kaupunki ja Lappeenranta arvioivat kevään aikana, miten ne voisivat hyödyntää videokuva-konenäköjärjestelmää ja omaisuuskarttaa omassa toiminnassaan.
– Uskomme, että Suomessa kehitetylle tämän tyyppiselle palveluratkaisulle löytyy vahva kysyntä kaupungeista niin Suomessa kuin ulkomaillakin. Toivomme, että saamme nopeasti useita kuntia yhteistyön piiriin. Se olisi ehdottomasti paras tapa hioa ratkaisusta vientikelpoinen palvelu, Mikko Haavisto toteaa.
Prosesseja, joissa liikennemerkkien inventointi ja jatkuva seuranta ovat hyödyksi, on monilla kuntatekniikan tehtäväalueilla. Ainakin kunnossapidon, liikennesuunnittelun, pysäköinninvalvonnan ja viestinnän prosesseissa liikennemerkit ja opasteet laadukkaina digitaalisina aineistoina arvellaan hyödyllisiksi.
Liikennesuunnittelussa on tärkeää tietää, ovatko merkit liikennesuunnitelmien mukaisilla paikoilla vai ei. Lisäksi katumaalausten kunto ja hallinta ovat tässä yhteydessä merkityksellisiä.
Kysymys myös omaisuuden kunnosta ja turvallisuudesta
Kunnossapidon kannalta liikennemerkit ovat omaisuuserä. Vanhentuneet ja huonokuntoiset liikennemerkit on vaihdettava. Kunnossapidon ja liikenneturvallisuuden kannalta olisi eduksi, jos tähän liittyvät prosessit saataisiin kuntoon. Esimerkiksi ilkivallan kohteeksi joutuneet tai onnettomuuksista vaurioituneet merkit voitaisiin korvata nykyistä nopeammin.
Pysäköinninvalvonnassa ja viestinnässä pysäköintikieltoaluekartta ja älykkäät pysäköinninvalvonnan ratkaisut tekevät tuloaan, ja siksi kaivataan uusia menetelmiä.
Kuntien digitalisaation ja prosessien kehittämisen avuksi on markkinoille tulossa monenlaisia ratkaisuja. Suomalaisen osaamisen ja palvelumuotoilun on arvioitu olevan maailman huipulla. Uudet innovaatiot ja niiden käyttöönotto edellyttävät usein prosessien uudistamista. Tässä nähdään haastava tehtävä kaupunkien organisaatioille. 
Kirjoittaja työskentelee hallituksen puheenjohtajana Vionice Oy:ssä.
Faktat
Liikennemerkkien inventointi Katajanokalla
■ Ajo yhdellä autolla kahtena eri päivänä, yhteensä noin neljä tuntia
■ Inventoitiin yhteensä 906 liikennemerkkiä, joista 150 suojatiemerkkiä ja 135 pysähtymis- tai pysäköintikieltoa
■ Käytetyt ajonopeudet olivat 10–30 km/h, ajomatka 18,1 km
■ 9,2 Gt videosiirtoa puhelimesta palvelimelle
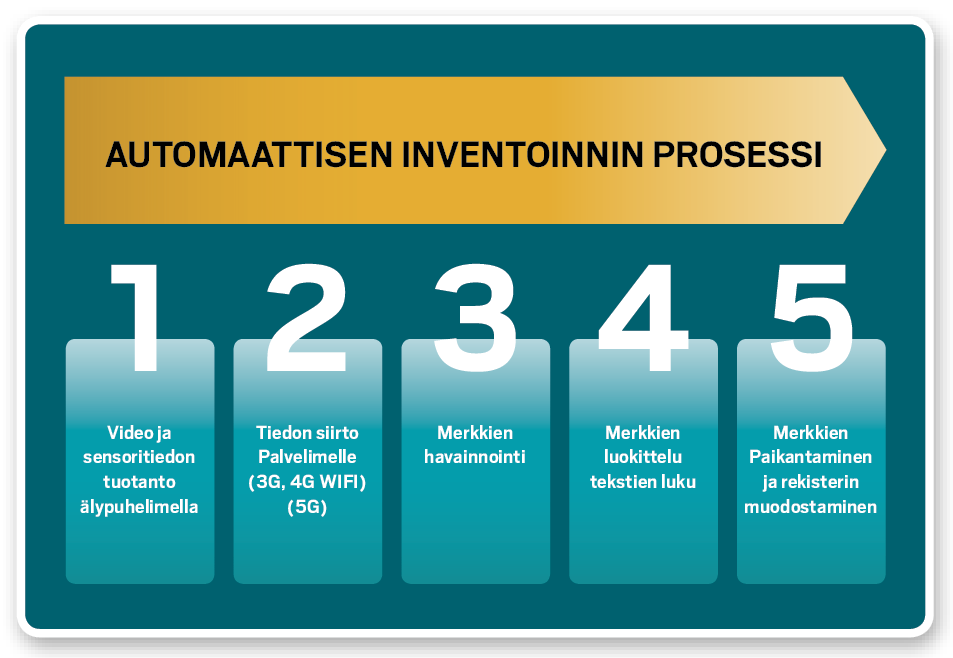
Tunnistusjärjestelmän vaiheet
■ Liikennemerkkien tunnistamista on tutkittu aiemmin tieteellisessä kirjallisuudessa kuljettajan apujärjestelmien näkökulmasta. Kunnossapitotiedon ja omaisuudenhallinnan näkökulmasta mobiilipuhelimella toteuttava palveluratkaisu on uusi, eikä vastaavia ole vielä tarjolla. Itse älykäs järjestelmä muodostuu seuraavista vaiheesta:
1) Video, ja sensoritiedon tuottaminen
2) Tiedonsiirto
3) Sensoritiedon käsittely
4) Liikennemerkin havaitseminen
5) Merkin tyypin luokittelu
6) Paikantaminen
Raakadata tuotetaan kunnossapitoajoneuvon ohjaamossa olevan älypuhelimen avulla. Tuotettu data siirretään palvelimelle, jossa liikennemerkit havaitaan videomateriaalista ja niiden tyyppi tunnistetaan konenäkömenetelmällä. Yksittäiset liikennemerkit paikannetaan tarkentamalla kameran GPS-tietoa perspektiiviprojektiolla ja georeferoinnilla.
Taustalla on Liikenneviraston ja Lappeenrannan teknillisen yliopiston konenäkölaboratorion tutkimus, jonka pohjalta on perustettu yritys ja lähdetty kehittämään teknologiaa edelleen. Tutkimuksesta on kerrottu laajemmin Kuntatekniikka-lehden numerossa 7/2014.


Faktat
Liikennemerkkien inventointi Katajanokalla
■ Ajo yhdellä autolla kahtena eri päivänä, yhteensä noin neljä tuntia
■ Inventoitiin yhteensä 906 liikennemerkkiä, joista 150 suojatiemerkkiä ja 135 pysähtymis- tai pysäköintikieltoa
■ Käytetyt ajonopeudet olivat 10–30 km/h, ajomatka 18,1 km
■ 9,2 Gt videosiirtoa puhelimesta palvelimelle
Tunnistusjärjestelmän vaiheet
■ Liikennemerkkien tunnistamista on tutkittu aiemmin tieteellisessä kirjallisuudessa kuljettajan apujärjestelmien näkökulmasta. Kunnossapitotiedon ja omaisuudenhallinnan näkökulmasta mobiilipuhelimella toteuttava palveluratkaisu on uusi, eikä vastaavia ole vielä tarjolla. Itse älykäs järjestelmä muodostuu seuraavista vaiheesta:
1) Video, ja sensoritiedon tuottaminen
2) Tiedonsiirto
3) Sensoritiedon käsittely
4) Liikennemerkin havaitseminen
5) Merkin tyypin luokittelu
6) Paikantaminen
Raakadata tuotetaan kunnossapitoajoneuvon ohjaamossa olevan älypuhelimen avulla. Tuotettu data siirretään palvelimelle, jossa liikennemerkit havaitaan videomateriaalista ja niiden tyyppi tunnistetaan konenäkömenetelmällä. Yksittäiset liikennemerkit paikannetaan tarkentamalla kameran GPS-tietoa perspektiiviprojektiolla ja georeferoinnilla.
Taustalla on Liikenneviraston ja Lappeenrannan teknillisen yliopiston konenäkölaboratorion tutkimus, jonka pohjalta on perustettu yritys ja lähdetty kehittämään teknologiaa edelleen. Tutkimuksesta on kerrottu laajemmin Kuntatekniikka-lehden numerossa 7/2014.